|
The Robot Power Scorpion CL is a compact high-performance
dual channel H-bridge speed controller for small robots, and other electrical
loads. It is designed for ant and beetle weight combat robots, R2D2
replicas, sumo robots, and other small robots such as firefighting
robots, maze solvers and carpet rovers. The Scorpion CL is also suitable
to drive pneumatic valves, solenoids, relays and thermoelectric coolers.
The Scorpion CL is designed to pack the highest power
handling capability, flexibility of control and usability options into a
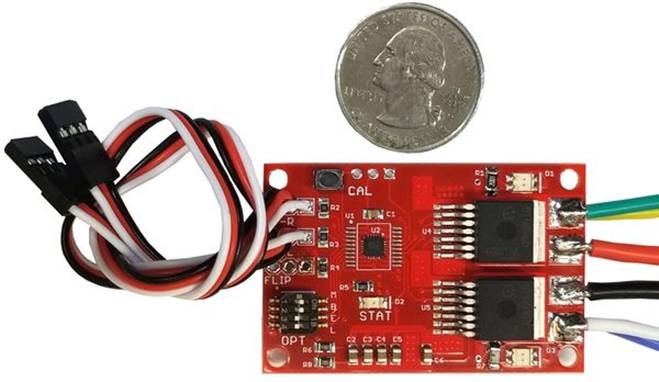
small flat package for use in space constrained applications. The Scorpion CL is designed without
screw terminals or other bulky connectors for the battery and motor
wires. Instead solder pads
are provided for factory soldered or user installed wires. This allows maximum flexibility
for power connections and keeps the Scorpion CL as small, lightweight and
flat as possible without reducing power handling.
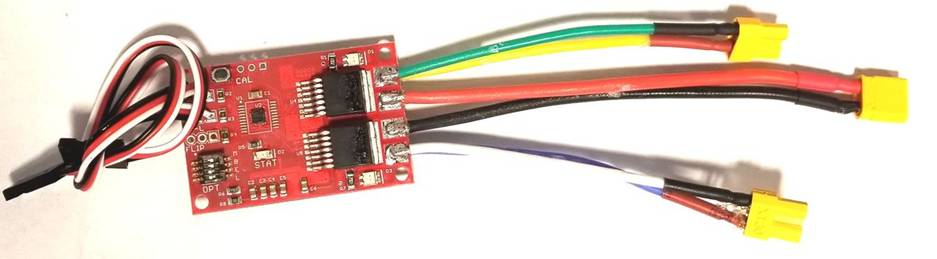
The Scorpion CL introduces Robot
Power's "Build Your ESC"
build-to-order program. These
optional additions to the base Scorpion CL allow you to receive your
Scorpion CL with factory installed custom length power wires, with or
without installed AMass XT30™ connectors. Finally we offer a spray-on
conformal coating to protect your ESC against environmental contamination
such as metal chips or accidental "dropped screw driver"
shorts. This significant
protection adds basically no weight.
Select your preferred options and exactly match your robot
dimensions in the Web store.
Features
- Size: 2.00" x
1.30" x .4" (51mm x 31mm x 10.4mm)
- Weight: 17.0 grams
- 6.0V to 28V (1S to 5S LiPoly) battery voltage
- 15A continuous (35A peak)
current on each channel.
- 1.5A - 5V receiver
battery eliminator circuit (BEC) - may be disabled by disconnecting
center wire in RC cables.
- Standard R/C pulse format
- Fully reversible H-bridge
design. Equal power handling in both directions on both channels.
- Full current limiting and
over temp limiting. This thing is nearly blow proof! Motors and
batteries are protected from dead short conditions.
- Two channels may be
either mixed (throttle/steering) or separately controlled. Ideal for
skid steer vehicles/robots.
- An optional third RC
channel controls a FLIP throttle reverse function. Activating when the robot is
inverted will allow normal driving response - handy in combat
situations. This input
can also be activated by a gravity (Mercury) logic-level switch.
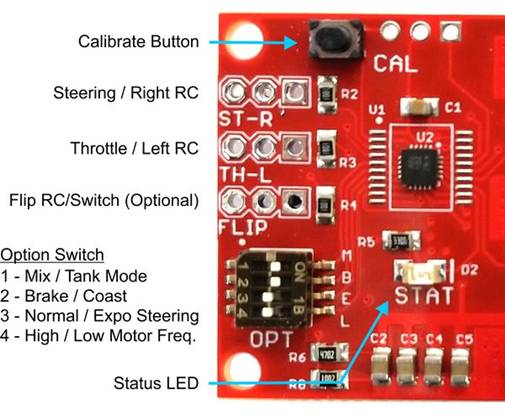
- Indicator LED for speed
and direction of motor on each channel
- Status LED status
information and mode indications
- Failsafe shuts off motors
if R/C signal is lost
- Calibrate function to
match unit to radio signal range. Settings retained in EEPROM
non-volatile storage.
- DIP switch to select
operating options.
Easily switch while running to test various options quickly
and easily.
- Channel Mix or Separate
control (tank) mode
- Brake or coast on zero
speed. Changes how
quickly motor stops.
- Normal (linear) steering
response or Exponential curve which has lower response close to
zero for less "twitchy" steering respose.
- High or Low frequency motor
frequency. High
frequency produces no audible sound from the motors at a cost of
slightly lower power handling.
Low frequency will make the motors "sing" at about
8kHz frequency but allows maximum power.
|