|
The Robot Power Scorpion XL v2.0 is a flexible high-performance
two-channel speed controller for small robots in the one to twelve pound
class. By using the latest automotive-rated power chips the Scorpion XL
is able to offer features, power handling and load protection
unprecedented in any controller of this size.
Robot Power,
As an online robot
building club we are always finding products that work and sharing our
findings. The Midwest region of R2 Builders started using the Scorpion XL
over a year ago. Upon seeing one put to use I got one myself. WOW! I'm
running two 100W Razor scooter motors off this thing and the control is
dependable, fluid and smooth. The 24V scooter motors are being run at
half voltage in my robot and friends are running theirs at full voltage,
yet the Scorpion works just as well both ways. I also am impressed with
the low amount of high pitched motor winding whistle noise from this
unit's low speeds, whereas other robots using different controllers with
the same motors have a more annoying amount of audible pitch.
I love the BEC, I just
charge my robot�s gel-cell battery bank and that's it! No dying R/C
receiver battery on a robot that has plenty of run time left.
Customer Craig from the
USA
I purchased a Scorpion XL
recently, and have just won a local robot tournament with it. It worked
great, and was especially easy to install, and was not intimidating, even
for someone fairly new to robotics. The control was excellent, to which I
associate the majority my advantage in the competition. It's ability to
easily calibrate and work right out of the package was also key. To
everyone that asks I thoroughly recommend it, and deem it well worth the
price, just by the extra features incorporated. (The flip switch saved my
bot on a several occasions.)
Having done a massive amount of research for this project, I've come to
realize the potential of this motor controller as a continually
expandable device.
Overall, thanks for an awesome product, I'd recommend it to anyone.
Customer Andy B. from The
USA
The Scorpion XL is designed for sumo robots, ant and beetle
weight combat robots and other small robots such as firefighting robots,
maze solvers and carpet rovers. It may be used on scooters, and robots up
to as much as 30 pounds or more as long as the motor current limits are
respected.
The built-in drive and mixing functions allow an all-in-one
solution for small robots and other loads.
 Features Features
The Scorpion XL contains the following features:
- Size: 2.7" x
1.6" x .5"
- Weight: 38 grams with
servo leads installed
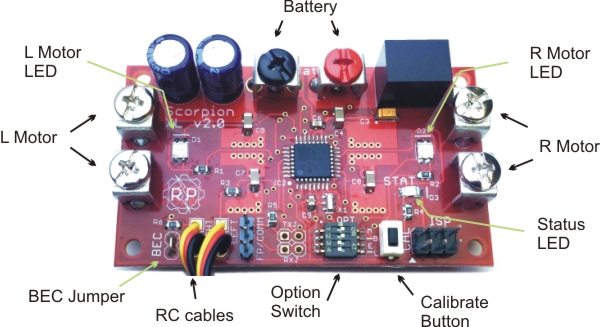
- Three R/C input leads for
- Left and Right Drive -
fully reversible H-bridge channels
- Flip Control (requires
RC extension cable not included) - reverses controls if robot is
flipped over
- 5.5V to 28V battery voltage
- Metal screw terminals for
reliable motor/battery connections - no soldering required
- 12.5A continuous current (30A peak) on each Left
and Right drive channels. This is a real 12.5A rating i.e. you can
put 12.5A through the output channels for several minutes with
higher peaks for a few seconds
- Full current limiting and
over temp limiting. This thing is nearly blow proof!
- Surface mount MOSFET
chips for reliability and to reduce the size of the unit
- 2 Indicator LEDs for
Left/Right speed and direction. A status LED shows the R/C signal
status and other information
- Left/Right channel mixing
is the default
- Switching style voltage
regulator for efficient operation at higher voltages
- Receiver battery
eliminator circuit (BEC) standard - may be disabled. This can
provide up to 300 mA of current at 5V to
the RC receiver and other attached electronic circuits.
- Failsafe shuts off motors
if R/C signal is lost
- Calibration function to
match Scorpion to your radio or other signal source - settings
stored in EEPROM
- FLASH-based
microcontroller with upgradeable software via in-circuit programming
header
|
|
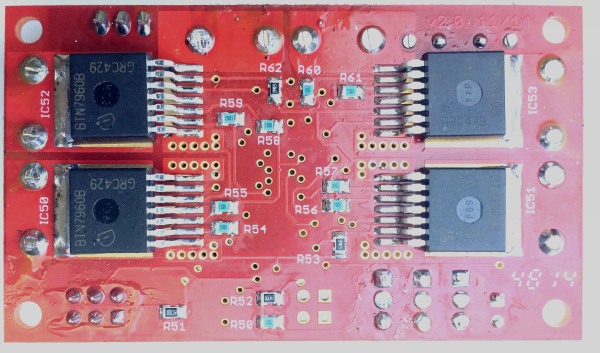
Scorpion XL back side
|
Operational Features
The Scorpion XL is designed to work with common R/C systems out of the box.
Microcontrollers such as PIC, AVR, ARM, Arduino etc. can drive the Scorpion
XL by using servo command outputs. The most common options are set up as
the default so no complicated configuration, calibration, or programming is
required.
The following configuration options are available via the Scorpion XL
Option DIP switch
- Mixing
- by default the left and right channels are mixed. No external
mixer unit is needed! This function allows one radio channel to be
used as the "throttle" control and one as the "steering".
This allows driving of differential drive robots in a natural and
intuitive way using a single transmitter stick. For independent
control of each output channel "Tank" mode is available.
Tank mode is also suitable for programmed control by microcontrollers
etc. which can do any needed channel mixing internally.
- Exponential
- by default the steering input response is linear RC stick position.
Thus at 50% stick position the output voltage will be set to 50% as
well. With the exponential function the output response is related via
an exponential curve to the input. This allows a softer response
around the center point while still giving full power at the extremes
of the control range. This setting helps when driving robots by eye as
it makes control smoother when giving small control inputs. Throttle
response is always linear.
- Flip
- by default the flip function is controlled by an R/C channel. This
allows easy control of the robot when running inverted or when driving
backward. The landing gear switch on an aircraft style radio or the
3rd channel on a pistol style are commonly used to activate this
function. An alternative configuration is to use a binary signal to
activate the motor flip function. In this configuration a switch is
connected between the signal wire and the ground wire on the Flip R/C
lead. When the switch is closed i.e. via a gravity "Mercury"
type switch, the flip function is activated. A logic level ouitput from a microcontroller may also be used.
- Frequency
- This DIP switch setting switches the Scorpion XL PWM frequency
between high and low frequency settings. At low frequency the unit
will be able to handle more power due to lower switching losses.
However, an audible "whine" sound may be emitted by the
motors. The high-frequency setting eliminates this sound as the
switching frequency is above the range of human hearing at the cost of
somewhat lower power handling capacity.
- BEC
- the 5V regulator on the Scorpion XL is connected to the power wire
on the servo leads by default. This allows the Scorpion to provide
power to the R/C receiver or external micro and eliminates the need
for an external R/C receiver battery. Cutting a jumper on the PC board
disables this function and allows a separate 5V supply to power the
R/C or master micro.
- Calibrate
- by activating the CAL button the Scorpion XL goes into calibrate
mode. This mode records the range of values sent by the radio system
or microcontroller signal source. Once the full range of values has
been sent, the Scorpion XL stores the values in non-volatile memory
and retains them. It is also possible to reset the values to the
factory defaults by entering calibrate mode with no signals present.
A User Manual for the Scorpion XL with details on setup and
operation of the controller is available soon from the downloads
page. Contact us for any detailed questions about setup or use of the
XL.
Robot Power offers the Scorpion XL in
fully assembled units ready to install and use. Check the Web store for details on prices and special offers.
|
